Sequence 3 : Comment améliorer la pince et la manette ?
Situation déclenchante
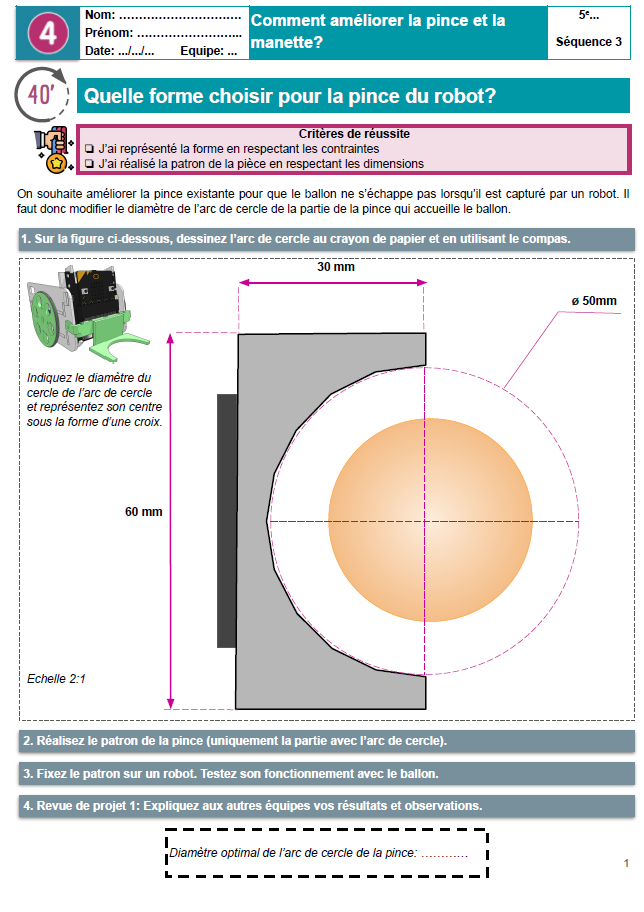
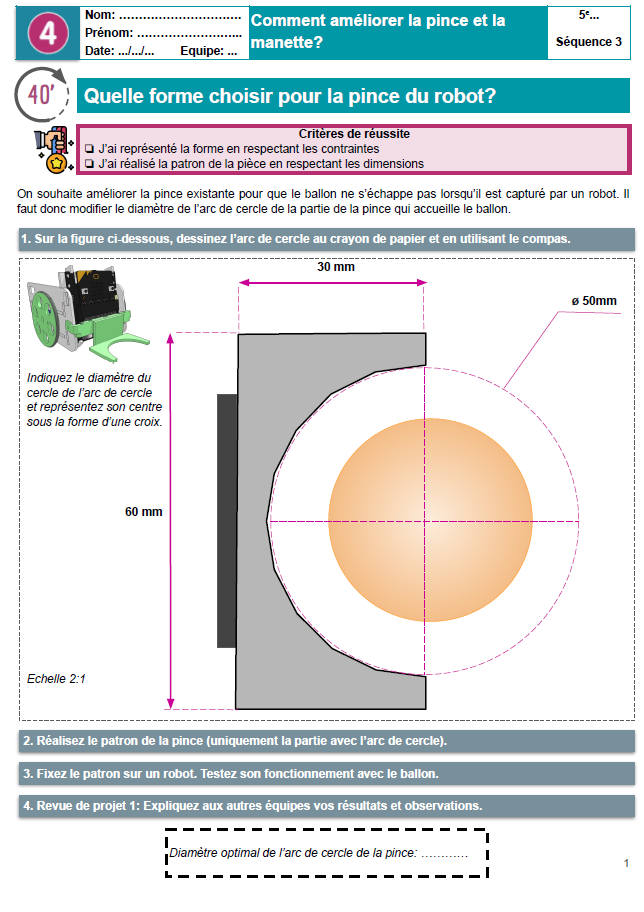
 Pour capturer le ballon, le robot est équipé d’une pince. Parfois il s’échappe de la pince. L’équipe adverse a alors la possibilité de récupérer la balle. On souhaite modifier la pince pour que le ballon ne s’échappe pas trop facilement.
Pour capturer le ballon, le robot est équipé d’une pince. Parfois il s’échappe de la pince. L’équipe adverse a alors la possibilité de récupérer la balle. On souhaite modifier la pince pour que le ballon ne s’échappe pas trop facilement.
L’inclinaison dans un sens ou dans l’autre de la carte micro:bit (télécommande) permet de commander les mouvements du robot. Cette carte étant petite et rectangulaire, il n’est pas facile de la maintenir dans les mains. Pour respecter le cahier des charges, nous devons construire une manette adaptée aux formes des mains.
Déroulement de la séquence 3
Questionnement 1
Binôme A : Quelle forme choisir pour la pince du robot ?
Binôme B : Quelle forme choisir pour la manette ?
Questionnement 2
Binôme A : Comment modifier le modèle 3D de la pince ?
Binôme B : Comment modifier le modèle 3D de la manette ?
Questionnement 3
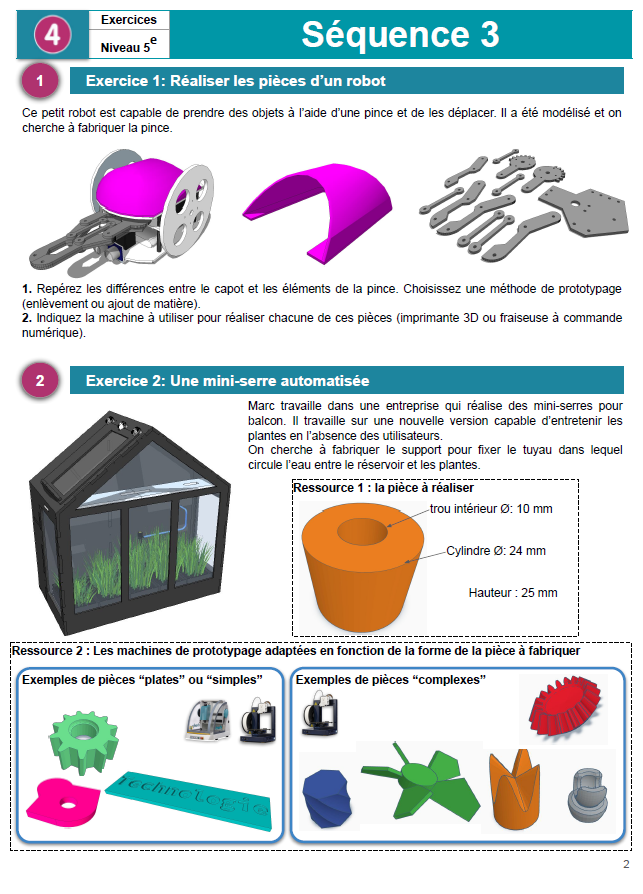
Binôme A : Comment fabriquer la nouvelle pince ?
Binôme B : Comment fabriquer la manette ?
| Accès aux ressources de la séquence | |||
|
Fiche séquence |
Fiche activité |
Eléments de synthèse |
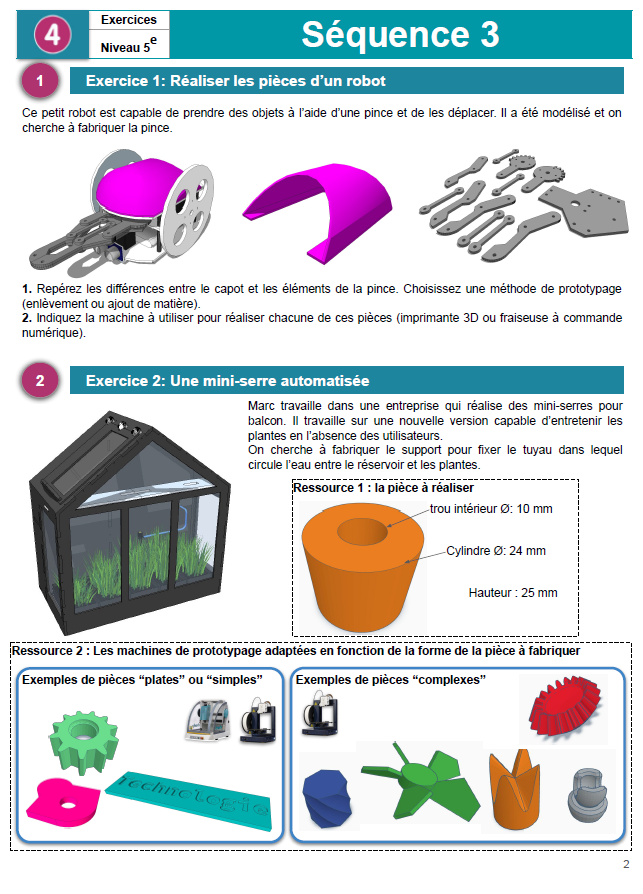
Exercices |

Cliquez sur les liens ci-dessous pour accéder directement aux autres séquences du projet "Let’s play soccer".
Séquence 1 : A quel besoin répond le robot soccer ? Comment détecter automatiquement un but ?
Sequence 2 : Comment fonctionne le robot soccer ?